|




|

■ 개 요 ■ 사 양 ■ 프로그램
■ 개요
◆ 다축의 반송・위치 결정 동작에 최적입니다.
□ PC베이스 플랫폼을 활용한 모션 콘트롤러 소프트웨어
□ 고속이고 치밀한 모션 제어를 실현
□ PLC로부터의 제어는 물론, C언어 프로그램으로부터도 제어가 가능
□ EtherCAT/MECHATROLINK에 대응
| 항목 |
RT-Motion |
| 제어 |
제어축수 |
60축 |
| 제어 동기 |
최고 속도 250마이크로 세컨드 |
| 위치 제어 |
○ |
| 지령 형식 |
|
C/C++/C#/PLC 언어(LD, FBD, SFC) |
| 적용예 1 |
|
|
【용도】
【구성】
|
워크 반송
XYZ3축
+회전축 |
| 소형으로부터 대형까지, 다축의 위치 제어에 최적 |
| 적용예 2 |
반송 대차( AGV)
|
|
【용도】
【구성】
|
팔레트 반송
XY2축 |
| 위치 정보가 많아도, 티칭으로 손쉽게 설정 |
PC의 최신 CPU의 연산 성능 통상의 PLC의 수백배의 연산 성능을 발휘
사이클 타임이 중요한 다축위치 결정 용도에 최적입니다.
|
지령 단위로—2,147,483,648~2,147,483,647 펄스의 고분해가능을 실현
정도가 중요한 다축으로의 위치 결정・조립 용도에 최적입니다.
|
지령 단위로—2,147,483,648~2,147,483,647 펄스의 고분해가능을 실현
정도가 중요한 다축으로의 위치 결정・조립 용도에 최적입니다.
|
지령 단위로—2,147,483,648~2,147,483,647 펄스의 고분해가능을 실현
정도가 중요한 다축으로의 위치 결정・조립 용도에 최적입니다.
|
◆ 고객과의 과제를 해결합니다
| 과제 1 |
| 생산 현장의 여러가지 데이터(생산관리 데이터, 제어 데이터, 품질 데이터, 보수 데이터등 )를 축적하고, 품질의 향상, 생산 코스트의 삭감 등에 도움이 되고 싶다. |
| 해결 1 |
RT-Motion는, 가동시키면서, 생산관리 데이터, 제어 데이터, 품질 데이터, 보수 데이터 등 유저가 채취하고 싶은 데이터를 샘플링 하고, CSV 형식의 파일 혹은 임의의 DB형식에서 축적합니다.
PC베이스의 콘트롤러 때문에, 대용량의 스토리지를 이용할 수 있습니다. |
| 과제 2 |
| 래더 언어로 특정의 기술자가 개선을 거듭해 변통 해 왔지만, 기술의 계승이 이루어지지 않았다.특정 메이커의 가라파고스적인 기술은 아니고 표준 기술로 옮겨놓고 싶다. |
| 해결 2 |
RT-Motion로는, PLC 언어의 국제표준규격 IEC 61131-3에 준거한 어플리케이션 인터페이스를 실장하고 있습니다.
또, 마이크로소프트사의 Visual Studio에 대응한 C/C++/ C#의 어플리케이션 인터페이스도 가지런히 하고 있어 표준 개발 언어로의 개발에 최적입니다. |
※EtherCAT□는, Beckhoff Automation GmbH, Germany의 등록상표입니다.
■ 사양
| 항목 |
내용 |
| 성능 사양 |
제어 축수 |
1-60 축 |
| 제어주기 |
최고속도 250μs |
| 최대 동기화 축수 |
60 축 |
| 서보 앰프 I/F |
EtherCAT CiA402 (csp mode) / MECHATROLINK-Ⅲ |
| 지정 위치 |
-2,147,483,648 ~ 2,147,483,647 (지령 단위) |
| 지령 속도 |
0 ~ 4,294,967,295 (지령 단위 / s) :( 위치 제어) |
| 가감 속 시간 |
0 ~ 4,294,967,295 (ms) : 가감 속 같은) |
| 지령 형식 |
C / C ++ / C # / PLC 언어 (LD, FBD, SFC) |
| 기능 |
제어 방식 |
원점 복귀 제어, PTP 제어, 위치 제어, 직선 보간 제어, 궤적 제어 |
| 가감 속 방식 |
사다리꼴 가감 속, S시 가감 속 |
| 수동 제어 |
JOG 운전, 수동 펄스 인칭 운전 |
| 동적 변경 |
현재 값 변경, 목표 위치 변경 기능, 토크 제한값 변경하고 재정의 변경 |
| 원점 복귀 방식 |
연결되는 서보 앰프의 기능에 따라 달라집니다. |
| 외부 I/O |
비상 정지 기능 |
| 유지 보수 |
에러 이력 수집 기능 |
| SRAM |
모션 제어 파라미터, 위치 데이터를 HDD에 저장 |
| 교육 |
GUI 도구에서 위치 데이터를 편집 |
| 모니터링 |
현재 위치, 현재 속도를 표시 |
| 서보 ON/OFF |
축 단위로 수동 조작 가능 |
| 디버깅 |
단계 기능, 스킵 기능 어떤 데이터 모니터 기능, 티칭 기능, 이력 모니터 기능, 추적 기능 |
| 보조 기능 |
전자 기어 |
서보 앰프 측에서 설정 |
| 리밋 SW |
서보 앰프 측에서 설정 |
| 토크 제한 |
서보 앰프 측에서 설정 |
| 보조 지령 |
오류 클리어 제어 중단 위치 결정 완료 신호 |
| 명령 줄 |
설정된 위치 결정 데이터를 실행 |
| 위치 결정 기능 |
위치 지정 |
절대 좌표, 상대 좌표 |
| 보간 동작 |
직선 보간 (최대 4 축 단위로 그룹) |
| 위치 데이터 수 |
600 점 |
| 운전 패턴 |
단독 위치 결정 / 연속 위치 결정 / 연속 궤적 |
| 가감 제어 |
Acc 명령 가속 시정 수 (msec) 최대 4 점 |
| 감속 제어 |
Dec 명령 감속 시정 수 (msec) 최대 4 점 |
| 슬립 |
Sleep 명령 msec |
| 루프 |
Loop 명령 반환 대상 No, 반복 횟수 지정 |
| 이동 속도 |
Velocity 명령, 지령 단위 / sec |
| 명령 |
PosAbs / PosInc / Loop / Sleep / Velocity / Acc / Dec / END |
■ 프로그램
RT-Motion은 다양한 모션 제어를 고객에게 맞는 프로그램으로 실현 가능합니다.
◆ 편리한 메모리 인터페이스
· RT-Motion에서는 다양한 프로그래밍 방식으로 모션 제어를 실현하기 위해, 사용하기 쉬운 메모리 인터페이스를 제공하고 있습니다.
· 이 메모리 인터페이스 PLC 프로그램 등에서 사용하는 것으로, 모션 제어를 실현 할 수 있습니다.

◆ 이용 예 : INplc 에서 RT-Motion을 이용하는 예



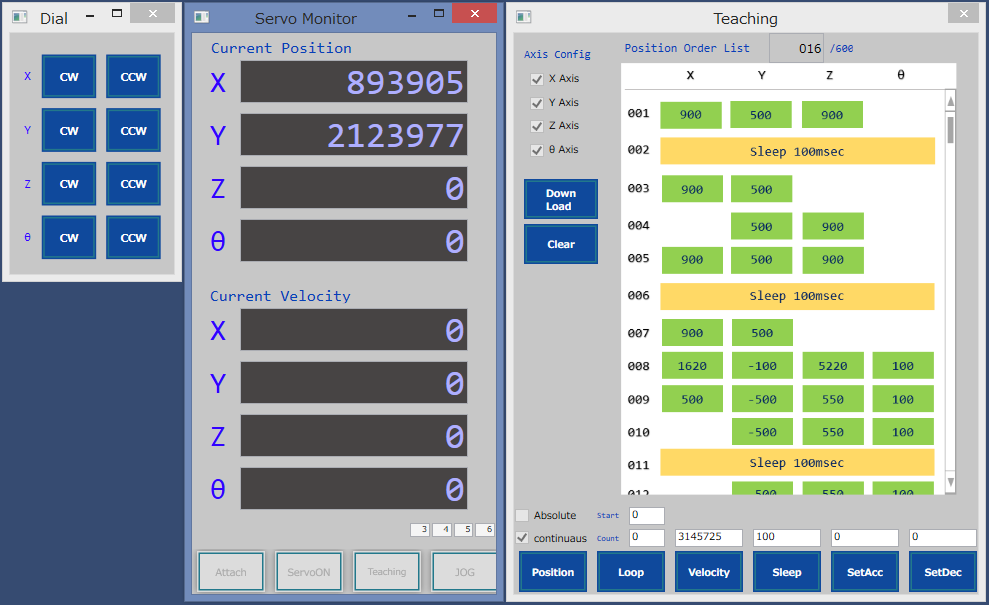
◆ 위치 결정 작업의 티칭 기능
* X, Y, Z Θ 테이블에서 3 축마다 티칭 설정을 할 수있는 교육 기능을 구현.
· 제어 대상이되는 모터를 이동 지점까지 이동, 정지 한 위치를 입력하는 제어 기능입니다.
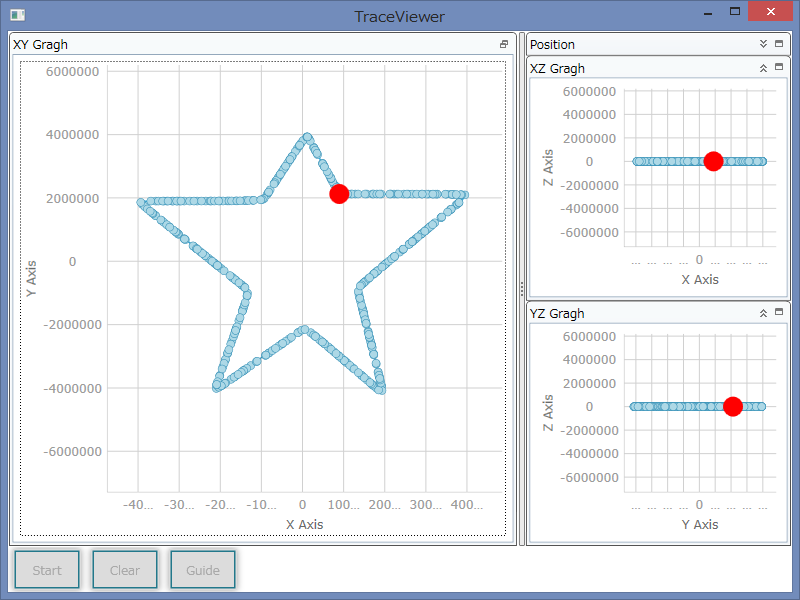
◆ 추적 뷰어 기능
· 다축 제어시의 좌표 궤적을 화면 추적 뷰어 기능을 구현하고 있습니다.
· 3축까지의 다축 제어에 대응하고, 제어 대상의 궤적 제어 디버깅 등에 이용할 수 있습니다.
|






{kind=link}
{kind=link}